![]()

技術コラム ポンプの周辺知識クラス
ポンプの周辺知識クラス
【B-2a】
駆動機(駆動機の概要)
ポンプの周辺知識のクラスを受け持つ、ティーチャーサンコンです。
今回から駆動機について、5回シリーズでご説明します。皆さんついてきてくださいね。
駆動機って何?
「駆動機」を厳密に定義すると「対象物を回転・移動させることを目的として、ある種の動力(エネルギー)を機械エネルギーに変換する機械・装置」となります。駆動機には様々な種類の動力源があります。よく知られているのは電気ですが、それ以外にも、油圧、空気圧、熱などがあります。
電動機(モーター)とは
ここからは駆動機の中でも、一般的によく使われている「電動機(モーター)」について解説していきます。
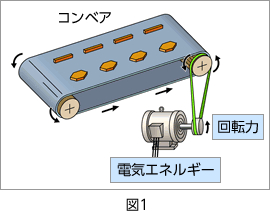
電動機は英語の「electric motor」に対応する用語で、「モーター」又は「モートル」とも呼ばれますが、中味は全く同じで、下図(図1)のように、電気エネルギー(電圧×電流)を機械エネルギー(回転力(※)×回転速度)に変換する機器の総称です。ここでは「モーター」と呼ぶこととします。
回転力とは
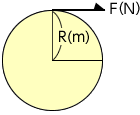
モーターは回転する力により仕事をするもので、回転体の半径とその外周に働く力の積を回転力(トルク)という。
回転力(N・m)=F(N) × R(m)
モーターの原理
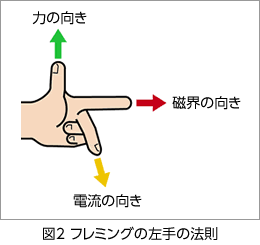
モーターは、磁場(磁界)と電流の相互作用による力(フレミングの左手の法則)を利用して、回転運動を得ます。直線運動を得る「リニアモーター」や、磁場を用いず圧電効果を利用した「圧電モーター」等もモーターとして実用化されていますが、ここでは主に産業用電機品として扱われている回転運動を行なうモーターについて説明します。
左手を下図2のように親指と人さし指と中指が互いに直角になるようにした時、人さし指は磁界の向き、中指は電流の向き、親指は力の向きとなります。
モーターの種類
モーターは、電源さえあれば手軽に取り扱えるところから「産業の米」と言われるほどいろんな分野で数多く使われてきており、小は電子・精密機器等で使用されている超小型モーターから、大は大容量ポンプ等の産業用機械に使われている超大型モータまで、容量・種類・用途とも多種多様です。
特に「かご形」誘導モーター(表1で黄色く着色した範囲)は、構造がシンプルで堅牢なことから、ポンプ、ファン、コンベア等の一般機械に幅広く用いられています。
| 種類 | 動作電源 | 構造 | 一定速/可変速 | 変速方式 | |
|---|---|---|---|---|---|
| 誘導モーター | 三相交流 | かご形 | 一定速 | ||
| 可変速 | 電気式 | インバーター式 | |||
| 渦電流継手式 | |||||
| 極数変換式 | |||||
| 機械式 | 摩擦車式 | ||||
| ベルト式 | |||||
| 巻線形 | 可変速 | 電気式 | 二次抵抗制御式等 | ||
| 単相交流 | コンデンサー始動形 | 一定速/可変速 | 電気式 | スピコン式等 | |
| 分相始動形 | |||||
| 反発始動形 | |||||
| 同期モーター | 三相交流 | 一定速 | |||
| 可変速 | サーボドライバー式 | ||||
| 直流モーター | 直流 | 直巻 | 可変速 | 静止レオナード、 サイリスタレオナード制御式等 |
|
| 分巻 | |||||
| 複巻 | |||||
| 整流子モーター | 三相交流 | 直巻 | 一定速 | ||
| 分巻 | 一定速 | ||||
| 単相交流 | 直巻 | 一定速 | |||
| 分巻 | 一定速 | ||||
上の表に示したように、モーターは、使用する電源の違い(直流/交流(単相/三相))、構造や特性の違い等によって種々に分類されます。また、設置場所(屋内/屋外)、保護方式、冷却方式、取付方法(フランジ/脚取付)によっても分類されますが、ここでは、モーターの基本動作原理に注目してみましょう。
直流と交流

電気には直流と交流とがあります。直流は電池のように電圧が一定で流れる方向が同じ電気なのに比べ、交流はコンセントの電気のように電圧が一定の周期(例えば60Hz)で変動し電流の流れる方向が変わります。交流の電圧は変圧器によって容易に変えられるので、家庭用、産業用等の広い用途に使われています。直流で動くモーターが直流モーター、交流で動くモーターが同期モータ、誘導モーターです。
単相と三相
交流には単相交流と三相交流の2種類があります。単相交流は主に家庭用や電灯用等の電力であり、三相交流は主に動力用等の電力です。単相が2本の線で電気を送るのに対し、三相は3本の線で、より効率よく電気を送ることができるので、沢山の電気を必要とする動力用には三相交流がよく使われているのです。
前述した磁場(磁界)と電流の相互作用(フレミングの左手の法則)の利用形態に着目すると、モーターは、「直流モーター」、「同期モーター」、「誘導モーター」の3つに大別されます。
1.直流モーター
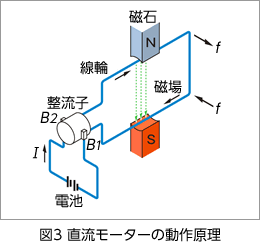
直流モーターは、直流電源を動力源とし、固定された磁場(N・S極の磁界がある場)におかれた導線に、流れる向きを交互に変えた電流を流すことによって回転運動を発生させます(図3)。
2.同期モーター
同期モーターは、回転子として直流モーターの導線の代わりに磁石を用い、固定された電機子に交流電流を流すことによって、電機子が受ける力の反作用として磁石を回転運動させる仕組みです(図4)。
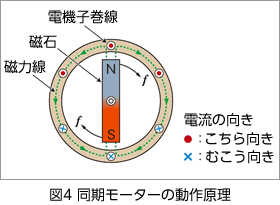
同期モーターは、ある範囲の負荷に対しモーターに加えられた交流の周波数に全く同期して回転することから、その名前があります。その速度を同期速度と呼び下記の式で表されます。

例えば、周波数50Hz、極数4Pの場合、同期速度は1500[min-1]となります。
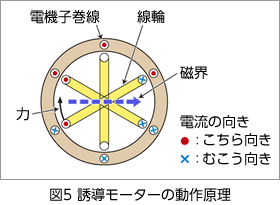
3.誘導モーター
誘導モーターは、同期モーターの磁石の代わりに回転子として鉄を用い、固定された電機子に交流電流を流すことにより回転子に誘導電流を発生させ、その電流と回転する磁場の変動によって回転子がつられて回転する仕組みを応用したものです(図5)。誘導モーターは構造がシンプルで堅牢であり、負荷の変動に対して強く、推奨使用範囲を瞬間的に多少はみだしても対応できる利点があります。
誘導モーターの内、図6に示すような「かご形回転子」を持ち「三相交流電源」で動く「三相交流かご形誘導モーター」が効率が良いことから主流で、産業用ポンプ等においても数多く使用されています。従来は変速に難点がありましたが、インバーターが開発されたことにより、可変速装置としても広範囲に使用されるようになってきています。
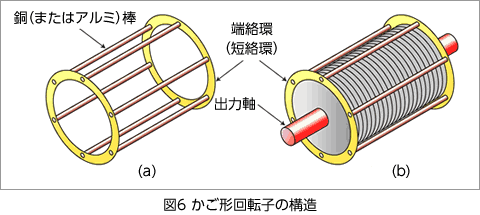
誘導モーターの回転子には、実際には図6の(a)のように2個の端絡環(短絡環)の間を多数の銅またはアルミの棒でつないで、(b)のように成層鉄心の中に埋めたものを使用します。これをかご形回転子と呼び、かご形誘導モーターの名前の由来です。
そろそろ時間ですね!最後にまとめをしておきましょう!!
本稿のまとめ
- 駆動機は動力源によって多種多様のものがある。
- 駆動機の主流であるモーター(電動機)は、電気エネルギーを機械エネルギーに変換する装置である。
- モーターにも動作原理が異なる様々な種類があるが、基本はフレミングの左手の法則によってすべて説明できる。
次回は、最も汎用的な電動機である「かご形誘導モーター」について説明します!!
-
 ポンプの
ポンプの
基礎知識クラス
移送に関する基本情報を
わかりやすくコンパクトに
解説していきます。- 【A-1a】ポンプの種類
- 【A-1b】ポンプの種類(容積式ポンプ)
- 【A-2】ポンプの原理
- 【A-3a】軸封装置
- 【A-3b】軸封装置(メカニカルシール)
- 【A-3c】軸封装置(グランドパッキン)
- 【A-4a】NPSH(Ⅰ)
- 【A-4b】NPSH(Ⅱ)
- 【A-5】ウォーターハンマー
- 【A-6a】ポンプ選定時に確認すべき事項(1)
- 【A-6b】ポンプ選定時に確認すべき事項(2)
- 【A-6c】ポンプ選定時に確認すべき事項(3)
- 【A-7a】ポンプに使用される金属材料について
- 【A-7b】ステンレス鋼について
- 【A-7c】ステンレス鋼の腐食形態について
- 【A-7d】ポンプに使用される非鉄金属について
- 【A-8a】ポンプに使用されるゴム材料について
- 【A-8b】ゴム材料の物理的な特性
- 【A-8c】ゴム材料の化学的な特性
- 【A-9a】金属材料への表面処理
-
 ポンプの
ポンプの
周辺知識クラス
規格や周辺機器情報などを
解説していきます。- 【B-1a】ポンプの洗浄1
- 【B-1b】ポンプの洗浄2(自動洗浄における洗浄効果の因子)
- 【B-1c】ポンプの洗浄3(SIPとASEPTIC)
- 【B-2a】駆動機(駆動機の概要)
- 【B-2b】駆動機(三相交流かご形誘導モーター)
- 【B-2c】駆動機(保護方式と耐熱クラス)
- 【B-2d】駆動機(モーター技術の動向)
- 【B-2e】駆動機(変速装置・減速装置)
- 【B-2f】駆動機(番外編:周波数)
- 【B-3a】インバーターの基礎知識(Ⅰ)
- 【B-3b】インバーターの基礎知識(Ⅱ)
- 【B-3c】インバーターの基礎知識(Ⅲ)
- 【B-3d】インバーターの基礎知識(Ⅳ)
- 【B-3e】インバーターの基礎知識(Ⅴ)
- 【B-3f】インバーターの基礎知識(Ⅵ)
- 【B-4】防爆
- 【B-5】管材と計測器
- 【B-6】トップランナーモーター
- 【B-7】マグネットカップリング
-
 移送物の
移送物の
基礎知識クラス
液の特長や性状および
主な用途などを
解説していきます。 -
 IoT・AIで変わる
IoT・AIで変わる
「送る&運ぶ」
移送・搬送の現場がIoT化、
AI(人工知能)活用で
どのように変わるのか。
伊藤元昭氏が解説します。- 第1回:産業機器のIoT化で何が変わるか
- 第2回:IoTは、日本のものづくり企業こそ活用すべき
- 第3回:AI活用の本質は、匠の技やベテランの知恵の機械化
- 第4回:AI活用を円滑・効果的に進めるための鍵は現場力にあり
- 第5回:AIの「ブラックボックス問題」との付き合い方
- 第6回:5Gで加速する工場・プラントでのIoT活用
- 第7回:ものづくりのDXで、現場の仕事はどう変わるのか?①
- 第8回:ものづくりのDXで、現場の仕事はどう変わるのか?②
- 第9回:協働ロボットで作る、人と機械が助け合う現場
- 第10回:コロナ禍で加速した、ものづくりでのAI/IoT活用
- 第11回:IoT/AIを駆使して対応する脱炭素時代のものづくり
- 第12回:製造業での脱炭素化、最初に始めたいこととは
- 第13回:サプライチェーンの管理は見える化から自律化へ
- 第14回:パブリックな仮想世界、メタバースは製造業に何をもたらすのか
- 第15回:メタバース上のバーチャルファクトリーで、多方面の専門家が密に協業
- 第16回:リチウムイオン二次電池から全固体電池へ、実現の鍵を握る技術「MI」
- 第17回:電極・電解質・イオン種、全方位で進化し続ける二次電池
- 第18回:スマホや自動運転車の技術転用で、産業機器や働くクルマの自律化を実現
- 第19回:再エネ主力電源化時代が到来、大口需要家である工場に求められる備えとは
- 第20回:メンテナンス業務を再定義する、IoT遠隔監視システム
- 第21回:生成AI活用で加速する、製造業での自動設計と新素材開発
-
 現場の声で、
現場の声で、
ひとくふう
モーノポンプの使い方は現場によりさまざま。
ひとくふうを加えると、
実はおもしろい発見が!



