![]()

技術コラム ポンプの周辺知識クラス
ポンプの周辺知識クラス
【B-3c】
インバーターの基礎知識(Ⅲ)
ポンプの周辺知識のクラスを受け持つ、ティーチャーサンコンです。
第3回目はインバーター駆動の特長についてご説明します。皆さんついてきてくださいね。
インバーター駆動の特長
インバーター駆動の特長は、省エネであるとともに豊富なアプリケーション機能を利用できる点です。
1.省エネ
インバーター駆動では、負荷が必要とする電力に見合った必要最小限の電力が供給されることから、電力の損失が少なく省エネルギーの運転ができます。例えば、図1は送風機制御に関する4つの方式(吐出側ダンパー制御(※)、吸込側ダンパー制御(※)、伝達動力可変制御(※)、インバータ制御)の所要動力の例を示したものです。
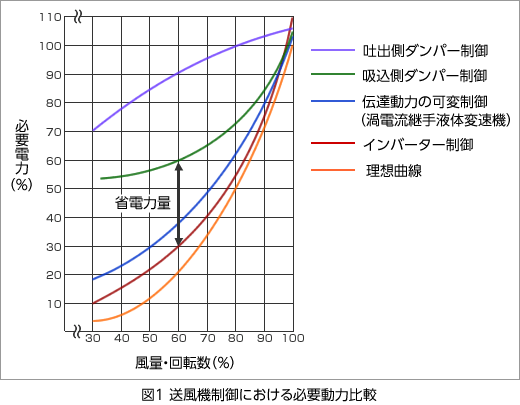
吐出側ダンパー制御や吸込側ダンパー制御はダンパーの角度調整によって風量を制御する方式であり、仕事量の目安となる風量が下がっても、送風機(モーター)の回転速度はほとんど変わらないことから所要動力もほとんど減少しません。
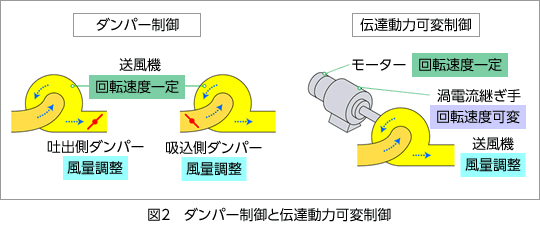
ダンパー制御とは:上図のように送風機の風量調整のために、吐出側もしくは吸込側に設置されるダンパー(絞り弁のようなもの)で風量を加減する方法です。
伝達動力可変制御とは:上図のように送風機の風量調整のために、送風機に渦電流継ぎ手式モーターを接続し、送風機の回転速度を調整することにより風量を加減する方法です。
伝達動力可変制御は渦電流継ぎ手式モーターを送風機に接続して送風機の回転速度を調整して風量を制御する方式ですが、渦電流継ぎ手式モーターは一定速度のモーターの回転を渦電流継ぎ手で滑らせて変速する方式であり、送風機の風量が下がってもモーターそのものの速度変化は少ないところから所要動力はあまり低下しません。
一方、インバーター制御は送風機に直結されたモーターそのものの回転速度をインバーターによって調整することによって風量を制御する方式であり、風量の低下に伴い必要動力が大幅に低下し理想曲線に近いことがわかります。理想曲線とは効率100%の可変速装置で運転したときの所要動力を示す曲線です。つまり、インバーター制御ではモーターそのものの回転速度を効率よく変化させることができるので、モーターに流れる電流はほぼ一定でも、回転速度が低くなるとモーターの必要な電圧が下がることで動力が減り、省エネとなります。
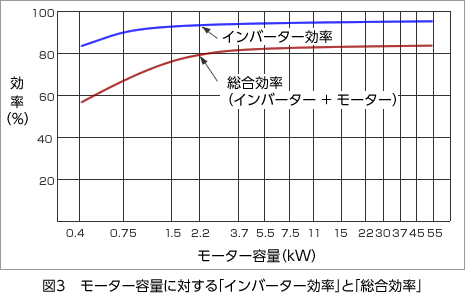
一方、図3はモーター容量ごとの、それを駆動する「インバーター効率」とモーター効率を含む「総合効率」を示した図です。モーター容量が小さいところではインバーター及びモーターの効率は低下しますが、容量が大きくなるとインバーター効率は90%以上、総合効率でも80%以上となり、駆動装置としてはかなり効率が良いことがわかります。
2.アプリケーション機能
初回のインバーターの基礎知識(Ⅰ)の「モーター回転速度の制御」のところで説明したように、モーターの回転速度は周波数にほぼ比例します。従って、モーターの回転速度はインバーターへの速度信号等(例えばDC0~10VやDC4~20mA等)により、電気的にほぼ無段階かつ簡便に設定・制御できます。制御速度の範囲もインバーター専用定トルクモーターを使えば、一般的に速度比1:20程度と広範囲となります。
これは、サーボモーターを除いて、他の可変速装置の制御速度範囲を大幅に上回っています。またほとんどのインバーターには、目的や用途に合わせて出力周波数を制御する豊富なアプリケーション機能が内蔵されています。

例えば、いくつかの入力信号の切り替えによって予め決められた速度で運転する「多段階速度機能」、時間の経過とともに予め設定した動作内容に従って運転する「プログラム運転機能」、運転状況に応じて制御できるフィードバック制御の一種である「PID制御機能」などの機能があります。インバーターはそれらの機能を含めて対象となる機械の運転に合わせて最適な方法を選ぶことができ、しかも構成がシンプルです。下記に代表的な3種の制御機能について説明します。
【多段階速度機能】
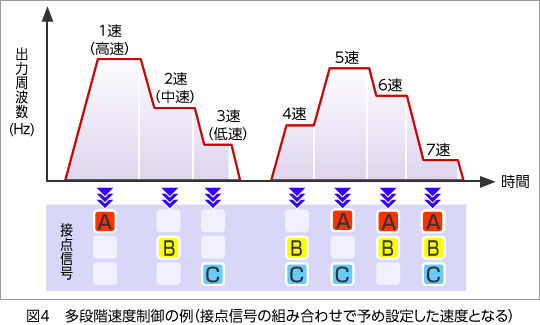
多段階速度機能は、インバーターへ入力する信号の切替に対応して、段階的に出力周波数を変更する機能です。例えば、図4のように3種類の信号「A」・「B」・「C」を入力する場合、その組合わせはA、B、C、A+B、A+C、B+C、A+B+Cの7種類のパターンがあります。予め「A信号の周波数は60Hz」のように設定しておけば、入力信号を変更することによって7種の出力周波数に変更することができます。
この機能は、従来の極数変モーターの速度切替より速度が任意に設定できるという点で柔軟性があり、速度は連続的ではありませんが、アナログ信号が不要なので、低速でもノイズの影響を受けない運転が可能です。
オフィスビル等で、1週間サイクルの時間帯について入館人員の変動が予めわかっているような場合の空調制御等に最適です。例えば空調用ファンの必要な風量(回転速度)比を低速、中速、高速の3段階とし、スケジュールタイマー等の信号により、時間帯によって切替を行なうといった制御が容易に行えます。
【プログラム運転機能】
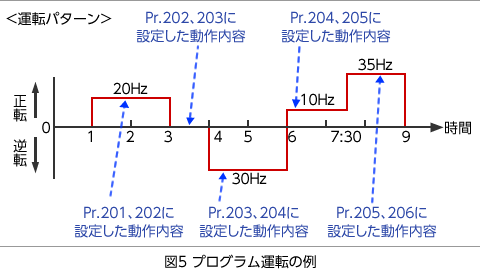
プログラム運転機能は、パラメーターにモーターの回転方向(正転/逆転)、周波数、運転時間等の運転パターンを予め設定しておくことで、設定した運転パターン通りに運転される機能です。図5のようにNO.1の設定であれば、正転、20Hzで1時00分から運転することになります。
必要な運転パターンを設定しておけば、設定通りの動作内容で運転させることができます。多段階速度機能は、運転パターンを設定する必要がありますが、プログラム運転機能は自己完結的で外部装置との接続が不要になる利点があります。上記「多段階速度機能」の例で、スケジュールタイマーのような機器が無い場合に有効です。
| No. | 動作内容 | パラメーター設定内容 |
|---|---|---|
| 1 | 正転・20Hz 1時00分 | Pr.201=1.20,1:00 |
| 2 | 停止 3時00分 | Pr.202=0. 0,3:00 |
| 3 | 逆転・30Hz 4時00分 | Pr.203=2.30,4:00 |
| 4 | 正転・10Hz 6時00分 | Pr.204=1.10,6:00 |
| 5 | 正転・35Hz 7時30分 | Pr.205=1.35,7:30 |
| 6 | 停止 9時00分 | Pr.206=0. 0,9:30 |
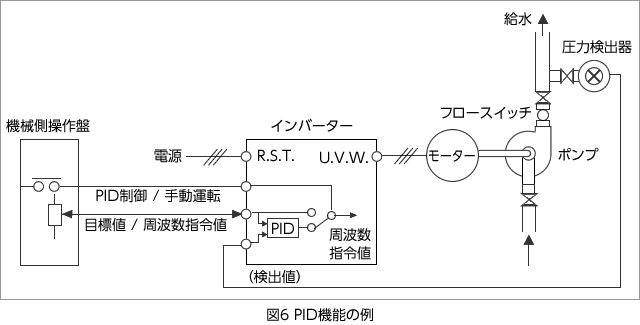
【PID機能】
PID機能は、フィードバック制御の一種で、出力値を、目標値と入力値の偏差(比例動作:Proportional)、その積分(積分動作:Integral)及び微分(微分動作:Differential)の3つの要素で計算して決める制御方法です。
「多段階速度機能」や「プログラム運転機能」は、予め設定した速度での運転や運転内容しかできませんが、PID機能は、リアルタイムに現状の運転状況のフィードバックを受けながら演算を行い、その結果に応じて出力値をリアルタイムに変更できる特長があり、前述の2つを更に発展した機能と言えます。
例えば、図6のように圧力検出器のようなセンサーからの信号で、ポンプの回転速度を制御するといった場合はよくありますが、インバーターのPID機能を利用すればPIDコントローラーを設置することが不要となり、制御システムの構成をシンプルにできます。インバーターのアプリケーション機能を有効に活用したケースと言えます。
そろそろ時間ですね!最後にまとめをしておきましょう!!
本稿のまとめ
- インバーター駆動の特長は省エネにつながること。
- インバーターには種々のアプリケーション機能、例えば「多段階速度機能」「プログラム運転機能」「PID機能」などがあり、目的に応じて最適の機能を選択できること。
- インバーター内蔵機能を利用することにより外部のコントローラーが不要となり、コンパクト化やコストダウンが図れること。
次回は、インバーターの問題点のひとつである「高調波」とその対策についてご説明します。
-
 ポンプの
ポンプの
基礎知識クラス
移送に関する基本情報を
わかりやすくコンパクトに
解説していきます。- 【A-1a】ポンプの種類
- 【A-1b】ポンプの種類(容積式ポンプ)
- 【A-2】ポンプの原理
- 【A-3a】軸封装置
- 【A-3b】軸封装置(メカニカルシール)
- 【A-3c】軸封装置(グランドパッキン)
- 【A-4a】NPSH(Ⅰ)
- 【A-4b】NPSH(Ⅱ)
- 【A-5】ウォーターハンマー
- 【A-6a】ポンプ選定時に確認すべき事項(1)
- 【A-6b】ポンプ選定時に確認すべき事項(2)
- 【A-6c】ポンプ選定時に確認すべき事項(3)
- 【A-7a】ポンプに使用される金属材料について
- 【A-7b】ステンレス鋼について
- 【A-7c】ステンレス鋼の腐食形態について
- 【A-7d】ポンプに使用される非鉄金属について
- 【A-8a】ポンプに使用されるゴム材料について
- 【A-8b】ゴム材料の物理的な特性
- 【A-8c】ゴム材料の化学的な特性
- 【A-9a】金属材料への表面処理
-
 ポンプの
ポンプの
周辺知識クラス
規格や周辺機器情報などを
解説していきます。- 【B-1a】ポンプの洗浄1
- 【B-1b】ポンプの洗浄2(自動洗浄における洗浄効果の因子)
- 【B-1c】ポンプの洗浄3(SIPとASEPTIC)
- 【B-2a】駆動機(駆動機の概要)
- 【B-2b】駆動機(三相交流かご形誘導モーター)
- 【B-2c】駆動機(保護方式と耐熱クラス)
- 【B-2d】駆動機(モーター技術の動向)
- 【B-2e】駆動機(変速装置・減速装置)
- 【B-2f】駆動機(番外編:周波数)
- 【B-3a】インバーターの基礎知識(Ⅰ)
- 【B-3b】インバーターの基礎知識(Ⅱ)
- 【B-3c】インバーターの基礎知識(Ⅲ)
- 【B-3d】インバーターの基礎知識(Ⅳ)
- 【B-3e】インバーターの基礎知識(Ⅴ)
- 【B-3f】インバーターの基礎知識(Ⅵ)
- 【B-4】防爆
- 【B-5】管材と計測器
- 【B-6】トップランナーモーター
- 【B-7】マグネットカップリング
-
 移送物の
移送物の
基礎知識クラス
液の特長や性状および
主な用途などを
解説していきます。 -
 IoT・AIで変わる
IoT・AIで変わる
「送る&運ぶ」
移送・搬送の現場がIoT化、
AI(人工知能)活用で
どのように変わるのか。
伊藤元昭氏が解説します。- 第1回:産業機器のIoT化で何が変わるか
- 第2回:IoTは、日本のものづくり企業こそ活用すべき
- 第3回:AI活用の本質は、匠の技やベテランの知恵の機械化
- 第4回:AI活用を円滑・効果的に進めるための鍵は現場力にあり
- 第5回:AIの「ブラックボックス問題」との付き合い方
- 第6回:5Gで加速する工場・プラントでのIoT活用
- 第7回:ものづくりのDXで、現場の仕事はどう変わるのか?①
- 第8回:ものづくりのDXで、現場の仕事はどう変わるのか?②
- 第9回:協働ロボットで作る、人と機械が助け合う現場
- 第10回:コロナ禍で加速した、ものづくりでのAI/IoT活用
- 第11回:IoT/AIを駆使して対応する脱炭素時代のものづくり
- 第12回:製造業での脱炭素化、最初に始めたいこととは
- 第13回:サプライチェーンの管理は見える化から自律化へ
- 第14回:パブリックな仮想世界、メタバースは製造業に何をもたらすのか
- 第15回:メタバース上のバーチャルファクトリーで、多方面の専門家が密に協業
- 第16回:リチウムイオン二次電池から全固体電池へ、実現の鍵を握る技術「MI」
- 第17回:電極・電解質・イオン種、全方位で進化し続ける二次電池
- 第18回:スマホや自動運転車の技術転用で、産業機器や働くクルマの自律化を実現
- 第19回:再エネ主力電源化時代が到来、大口需要家である工場に求められる備えとは
- 第20回:メンテナンス業務を再定義する、IoT遠隔監視システム
- 第21回:生成AI活用で加速する、製造業での自動設計と新素材開発
-
 現場の声で、
現場の声で、
ひとくふう
モーノポンプの使い方は現場によりさまざま。
ひとくふうを加えると、
実はおもしろい発見が!



