![]()

技術コラム ポンプの周辺知識クラス
ポンプの周辺知識クラス
【B-2b】
駆動機(三相交流かご形誘導モーター)
ポンプの周辺知識のクラスを受け持つ、ティーチャーサンコンです。
今回は、最も汎用的な電動機である「三相交流かご形誘導モータ」について説明していきます。
三相交流かご形誘導モーターは、構造がシンプル・堅牢で使いやすく、比較的安価に入手でき、一定速・可変速にも対応できるため、最も幅広く使用されているモーターの一つです。
原理
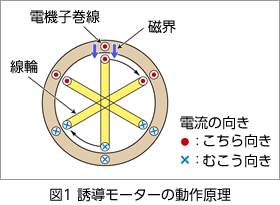
前回の講義の復習になりますが、誘導モーターは回転子として鉄を用い、固定された電機子に交流電流を流すことで回転子に誘導電流を発生させ、その電流と回転する磁場の相互作用によって回転子がつられて回る仕組みを応用したモーターです(図1)。
構造
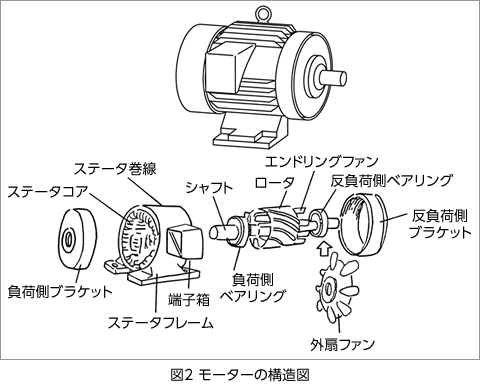
その構造は、シャフト(軸)と、一体に回転するローター(回転子)と、ローターと相互作用してトルクを発生させるステーター(固定子)、回転するシャフトを支えるベアリング、発生した熱を逃がす外扇ファン、それらを保護するフレーム、ブラケット等から構成されます(図2)。
ローターには、溝を軸方向に対して斜めに切った斜溝回転子がよく使われています。回転子がどの位置にあっても始動トルクが一様であり、磁気的うなり音も小さいためです。かご形誘導モーターの固定子と回転子の間の空隙は、効率や力率を向上させるため、モーターの大きさにもよりますが、0.5mm程度と極めて狭くなっています。
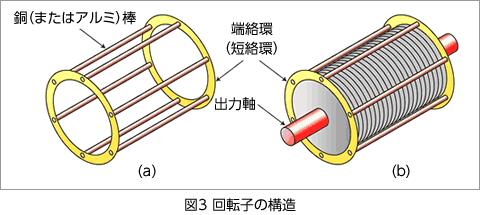
誘導モーターの回転子には、実際には下図3の(a)のように2個の端絡環の間を多数の銅またはアルミの棒でつないで、(b)のように成層鉄心の中に埋めたものを使用します。これをかご形回転子と呼び、かご形誘導モーターの名前の由来です。
運転特性とその選定
モーターは、負荷に対する対応能力を想定し、必要とされる能力を設定して製作されます。従って、能力以上の負荷には対応できませんし、逆に必要以上の能力を持つモーターを選定してもオーバースペックになり意味がありません。つまり、用途と必要な能力に見合った駆動機を選定することが重要です。
1.最適な駆動機を選定するために知っておくべき基本特性
かご形誘導モーターは、負荷と接続して一定電圧・一定周波数(例えば200V・60Hz)の商用電源を投入した時、始動・加速・一定速に到る過程での最大限のトルク、電流・すべりは変化する基本特性があります。
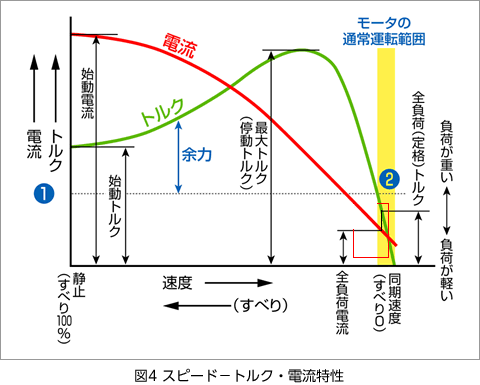
例えば、下図4のようなスピード(回転速度)とトルク・電流の関係となります。従って、運転時に、能力を超えての過負荷にならない駆動機を選定する必要があります。
※すべりとは
誘導モーターはすべりによってローターに誘導電流が流れ、回転する磁界との相互作用で回転力が生じる。定格でのすべりは次式で表わされる。

同期速度
交流電源の周波数をf(Hz)、モーターの極数をPとしたとき、同期速度ηsは次式で決まる。
回転速度と「すべり」の関係
かご型誘導モーターは、磁界が回転子の回転速度より速く回転することにより回転子に誘導電流が発生し、その電流と回転する磁場の相互作用によって回転子がつられて回る仕組みです。従って、磁界の回転する速度と回転子の回転する速度にはズレが生じます。このズレを「すべり」と呼びます。
「すべり」が小さい範囲(最大トルクよりも右側)では、トルクはほぼ回転速度に比例しますが、「すべり」がある一定範囲(最大トルクよりも左側)を超えてしまうと、トルクは逆に減少し負荷に勝てずモーターは停止してしまいます。従って、通常運転では「すべり」が小さい範囲で運転しなければなりません。
トルク特性(回転速度とトルクの関係)
始動時のモータートルク(始動トルク:図4の最も左の点でのトルク)は定格トルクの2~3倍です。負荷トルクがモーターの始動トルクより大きいとモーターは動けません。
モータートルクが負荷トルクより大きいと、その差は回転速度を上げるために使用でき、回転速度があがります。回転速度が上昇するにつれてモータートルクは徐々に増加して、最大トルク(停動トルク)に達した後は減少し、やがて負荷トルクとモーターのトルクが同じとなり釣り合う点でモータートルクと負荷トルクの差は「0」となりそれ以上は回転速度があがりません。
負荷が重すぎて始動に時間がかかったり、回転しないのにそのまま電流が流れると、モーターの巻線を焼損する恐れがあるので、モーター出力・始動方式の選定に当たっては相手機械の起動トルクや運転トルク等の負荷の特性を十分に確認することが必要です。また、モーターが動いた後でも負荷トルクが最大トルクよりも大きくなると、モーターは減速して遂には止まってしまいます。つまり、負荷に対して必要な能力(回転させる力とその回転速度)のあるモーターを選定する必要があります。
電流特性(回転速度と電流の関係)
一方、回転速度と電流についても以下のような関係があります。
商用電源直入れ始動の時の電流は、定格(全負荷とも呼びます)電流に対して最大6~8倍流れ、回転速度が上昇するにつれ減少し、負荷がない運転状態(無負荷運転:図4の最も右)でも電流は流れます。つまり、起動時には高い始動電流が流れることを想定する必要がありますが、ある回転速度以上になれば大きな電流は必要でなくなります。
定速運転ではモーターにかかる負荷が大きくなるとモーターの速度は低下し電流は増加し、負荷が小さくなるとモーターは同期速度に近く上昇し電流は減少します。モーターに流れる電流が増加して過大になると、モーターが発熱し温度が上昇して遂にはモーターの巻線を焼損してしまいます。従って、モーターの通常運転範囲は、モーターに必要以上の負荷がかからない、即ち、連続運転できる定格トルクの範囲で運転する必要があります。
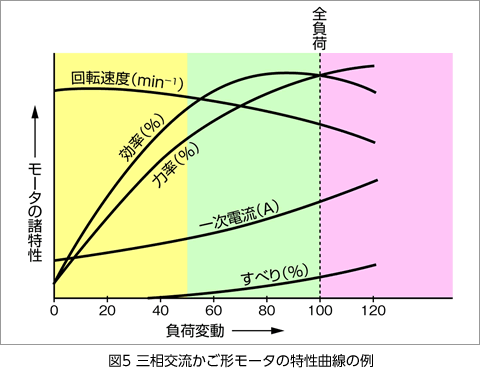
2.負荷特性
三相交流かご形誘導モーターの諸特性は、下図5のように負荷の変動により変化します。全負荷より右側の範囲(図5の赤色)ではモーターは負荷に耐えきれません。従って、左側で運転する必要がありますが、図5の黄色の範囲で運転すれば効率・力率が悪く損失が多くなります。従って図5の緑色の効率や力率が良い範囲で運転できる選定をする必要があります。
効率
モーターの効率は一般的に次のように表されます。

すなわち出力=入力-損失から、損失は入力-出力として定義され、銅損、鉄損等の電気的な損失と、軸受けの摩擦損失や冷却ファン損失による機械的な損失等からなります。
銅損は銅の巻線を電流が流れることにより生じる損失で、鉄損は回転子の鉄板に生じる誘導電流による損失であることから、この名前があります。
標準的なモーターの場合、効率の最高値は75~90%前後で、大容量になるほど効率が高くなり、小容量になるほど低下します。損失は、モータ内で熱、振動、音などのエネルギーに変わってしまうもので、できるだけ少ないほうが良いものです。
力率
力率は交流に特有な概念で実際の仕事をする率(直流では常に1)という意味であり、電圧と電流の位相差を余弦(cosθ)で表しています。モーターの力率は定格負荷では一般的に0.7~0.9程度で、モーター容量が大きいほど高くなり、小さくなるほど低下します。又、負荷率の高低によっても変わり、負荷率が高いほうが高くなります。低すぎる力率は電源側の負担となるので、0.7以上の範囲で使うようなモーター選定をすべきです。
そろそろ時間ですね!最後にまとめをしておきましょう!!
本稿のまとめ
- 一定速・可変速に対応でき多様な変速方式も選択できるため、産業用モーターとして最も幅広く使用されているモーターであること。
- モーターを上手に使用(高い運転効率で使う)するためには、その運転特性や、対象となる負荷の性質をよく理解・考慮して選定すること。
次回はかご形誘導モーターの保護方式と耐熱クラスついて説明します!!
-
 ポンプの
ポンプの
基礎知識クラス
移送に関する基本情報を
わかりやすくコンパクトに
解説していきます。- 【A-1a】ポンプの種類
- 【A-1b】ポンプの種類(容積式ポンプ)
- 【A-2】ポンプの原理
- 【A-3a】軸封装置
- 【A-3b】軸封装置(メカニカルシール)
- 【A-3c】軸封装置(グランドパッキン)
- 【A-4a】NPSH(Ⅰ)
- 【A-4b】NPSH(Ⅱ)
- 【A-5】ウォーターハンマー
- 【A-6a】ポンプ選定時に確認すべき事項(1)
- 【A-6b】ポンプ選定時に確認すべき事項(2)
- 【A-6c】ポンプ選定時に確認すべき事項(3)
- 【A-7a】ポンプに使用される金属材料について
- 【A-7b】ステンレス鋼について
- 【A-7c】ステンレス鋼の腐食形態について
- 【A-7d】ポンプに使用される非鉄金属について
- 【A-8a】ポンプに使用されるゴム材料について
- 【A-8b】ゴム材料の物理的な特性
- 【A-8c】ゴム材料の化学的な特性
- 【A-9a】金属材料への表面処理
-
 ポンプの
ポンプの
周辺知識クラス
規格や周辺機器情報などを
解説していきます。- 【B-1a】ポンプの洗浄1
- 【B-1b】ポンプの洗浄2(自動洗浄における洗浄効果の因子)
- 【B-1c】ポンプの洗浄3(SIPとASEPTIC)
- 【B-2a】駆動機(駆動機の概要)
- 【B-2b】駆動機(三相交流かご形誘導モーター)
- 【B-2c】駆動機(保護方式と耐熱クラス)
- 【B-2d】駆動機(モーター技術の動向)
- 【B-2e】駆動機(変速装置・減速装置)
- 【B-2f】駆動機(番外編:周波数)
- 【B-3a】インバーターの基礎知識(Ⅰ)
- 【B-3b】インバーターの基礎知識(Ⅱ)
- 【B-3c】インバーターの基礎知識(Ⅲ)
- 【B-3d】インバーターの基礎知識(Ⅳ)
- 【B-3e】インバーターの基礎知識(Ⅴ)
- 【B-3f】インバーターの基礎知識(Ⅵ)
- 【B-4】防爆
- 【B-5】管材と計測器
- 【B-6】トップランナーモーター
- 【B-7】マグネットカップリング
-
 移送物の
移送物の
基礎知識クラス
液の特長や性状および
主な用途などを
解説していきます。 -
 IoT・AIで変わる
IoT・AIで変わる
「送る&運ぶ」
移送・搬送の現場がIoT化、
AI(人工知能)活用で
どのように変わるのか。
伊藤元昭氏が解説します。- 第1回:産業機器のIoT化で何が変わるか
- 第2回:IoTは、日本のものづくり企業こそ活用すべき
- 第3回:AI活用の本質は、匠の技やベテランの知恵の機械化
- 第4回:AI活用を円滑・効果的に進めるための鍵は現場力にあり
- 第5回:AIの「ブラックボックス問題」との付き合い方
- 第6回:5Gで加速する工場・プラントでのIoT活用
- 第7回:ものづくりのDXで、現場の仕事はどう変わるのか?①
- 第8回:ものづくりのDXで、現場の仕事はどう変わるのか?②
- 第9回:協働ロボットで作る、人と機械が助け合う現場
- 第10回:コロナ禍で加速した、ものづくりでのAI/IoT活用
- 第11回:IoT/AIを駆使して対応する脱炭素時代のものづくり
- 第12回:製造業での脱炭素化、最初に始めたいこととは
- 第13回:サプライチェーンの管理は見える化から自律化へ
- 第14回:パブリックな仮想世界、メタバースは製造業に何をもたらすのか
- 第15回:メタバース上のバーチャルファクトリーで、多方面の専門家が密に協業
- 第16回:リチウムイオン二次電池から全固体電池へ、実現の鍵を握る技術「MI」
- 第17回:電極・電解質・イオン種、全方位で進化し続ける二次電池
- 第18回:スマホや自動運転車の技術転用で、産業機器や働くクルマの自律化を実現
- 第19回:再エネ主力電源化時代が到来、大口需要家である工場に求められる備えとは
- 第20回:メンテナンス業務を再定義する、IoT遠隔監視システム
- 第21回:生成AI活用で加速する、製造業での自動設計と新素材開発
-
 現場の声で、
現場の声で、
ひとくふう
モーノポンプの使い方は現場によりさまざま。
ひとくふうを加えると、
実はおもしろい発見が!



