![]()

技術コラム ポンプの周辺知識クラス
ポンプの周辺知識クラス
【B-3b】
インバーターの基礎知識(Ⅱ)
ポンプの周辺知識のクラスを受け持つ、ティーチャーサンコンです。
今回は、前回の続きでインバーターの基本制御方式とインバーター駆動におけるモーター特性についてご説明します。皆さんついてきてくださいね。
インバーター駆動におけるモーターの特性(回転速度とトルクの関係)
モーターの特性は、モーターの種別(インバーター専用モーターか、汎用モーターか)やインバーターの基本制御方式(Vf制御か、センサレスベクトル制御か)によって異なります。インバーター専用モーターはインバーター駆動専用にモーターのコイルの絶縁が強化されたモーターであり、その中でもインバーター専用定トルクモーターはその名のとおり、一般的に6~60Hzの範囲で定格トルクで連続運転性能が保証されたモーターです。
一方、汎用モーターは一般的に商用電源駆動での一定速運転用です。200V級の汎用モーターはインバーターでの駆動も可能ですが、そのトルク特性(定トルクか、低減トルクか)はインバーターの制御方式によって異なります。
400V級の汎用モーターは一般に絶縁上の問題からインバーター駆動が不可ですので注意が必要です。広い変速を必要とする負荷の場合、インバーター駆動では少数の例外を除いてインバーター専用定トルクモーターが使用され、商用電源駆動では汎用モーター(一般に三定格、例えば200V級の場合、200V/50Hz、200V/60Hz、220V/60Hz)が使用されることが一般的です。
基本制御方式の違いによるモーター特性の差
【B-2d】駆動機(モーター技術の動向)でも少し触れましたが、インバーターの基本制御方式としては「Vf制御」と「ベクトル制御」に大別され、ベクトル制御には「センサレスベクトル制御」と「センサー付きベクトル制御」の2つの制御方法があります。「センサー付きベクトル制御」は速度検出センサー付きを前提とした制御方式ですが、高価かつ一般的ではないので、ここでは説明を省略し、「Vf制御」と「センサレスベクトル制御」についてのみを比較します。
【Vf制御】

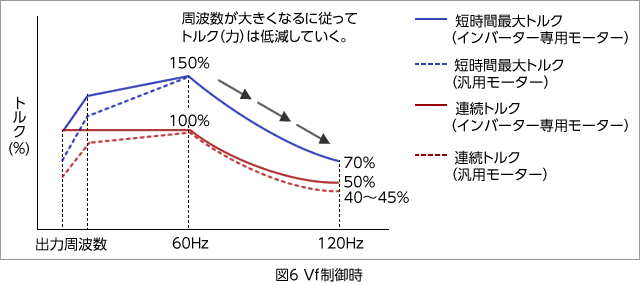
「Vf制御」(図6参照)は、インバーターが世の中に出現した当初から存在する「周波数」と「電圧」を同時に制御する古典的な制御方式で、下記にあげるようなトルク特性上の特徴があります。
- 出力する周波数に対応して、Vf特性(パラメーターとして設定する)から一義的に定まる電圧をモーターのすべり等の状態に無関係に出力するが、Vf制御は図6に示すようにモーターの低周波数域でのトルク特性(汎用モーターでは低周波数域でのトルクが低下し特に始動トルクが小さい)に難点がある。
- インバーター専用定トルクモーターの場合は、一般的に6~60Hzで定トルクで連続運転での温度上昇に耐えられる設計になっており、一般にVf制御においても6~60Hzで定トルクで連続運転が可能である。
- 反面汎用モーターの場合は、30Hz以下の周波数ではモーターの冷却能力が低下し温度上昇等の問題がある。従って、モーターの連続運転トルクの低減を考慮する必要があり、連続運転範囲を狭くするかモーター容量を大きいものを選定する等の対策が必要となる。
【センサレスベクトル制御】
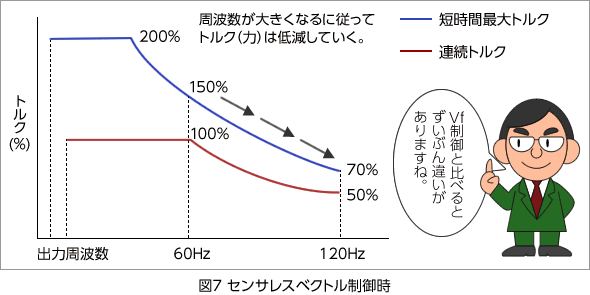
「センサレスベクトル制御」(図7参照)は、マイクロプロセッサーの処理速度向上等のハードウェアの進歩により、「Vf制御」のトルク特性上の諸問題を改善すべく出てきた制御方式で下記のような特性があります。
- 速度検出センサーなしに、予め設定したモーターの特性定数(抵抗値等)や電圧・電流からモーターの回転速度(すべり)を推定し、出力すべき電圧をベクトル演算で決定する。
- モーターの運転状態に見合ったほぼ最適に近い電圧が出力されモーターの発熱が抑えられるので、インバーター専用定トルクモーターはもちろん、小容量(1.5kW以下)の汎用モーターでも6~60Hzで定トルクで連続運転が可能になる。
- 更に低速での短時間最大トルクが大幅に向上する。このことは始動トルクの差にもなるので、センサレスベクトル制御が起動トルクが大きい負荷の起動には適している。
- ただ汎用モーターの場合、モーター容量が大きくなると低周波数域ではモーターの連続運転トルクが低減することは避けられないことも認識しておく必要がある。
インバーター駆動における留意点
インバーター駆動時の基底(ベース)周波数は60Hz。それを越える周波数で運転すると連続トルクは低下します。
モーターは、商用電源駆動では、50Hz又は60Hzの周波数とその時の電圧に対して定格トルクで連続運転が可能なように設計されています。一方インバーター駆動では様々な周波数で運転されますが、一般的には60Hzが定格周波数として設計されており、基底(ベース)周波数とも呼ばれています。
基底周波数を越える領域で使用する場合、インバーターは120Hzまで一般的に問題ありませんが、モーターはモーター容量によって最高周波数が変わる場合があることに注意が必要です。さらに、電圧は変わらず定出力に近い特性となるので、上図(図6、図7の出力周波数が60~120Hzの範囲)のようにモーターの発生トルクは周波数が大きくなるに従って低減することから、負荷トルクが一定であってもモータートルクが不足する恐れがあり注意が必要です。
インバーター駆動の始動トルクや始動電流は商用電源駆動より小さい。
商用電源の直入れでは、モーターに加える電圧と周波数が大きい為、大きな始動トルク、すなわち定格トルクの200~300%程度が得られますが、始動電流も大きく定格電流の600~800%程度となります。
一方、インバーター駆動では周波数と電圧は0から徐々に上がりモーターに加えられるので、始動トルクは定格の100~200%程度と小さくなりますが、始動電流も100~200%程度と小さくなることから、ブレーカの容量を下げられる可能性があります。
そろそろ時間ですね!最後にまとめをしておきましょう!!
本稿のまとめ
- インバーターの基本制御方式として、従来からのVf制御に加えて、トルク特性が向上するセンサレスベクトル制御が出て来ており広く使われるようになってきている。
- インバーター駆動時の基底周波数(60Hz)を越える周波数で運転すると連続トルクは低下する。
- インバーター駆動では始動トルクや始動電流は商用電源駆動よりも小さくなる。
次回は、インバーターが、省エネに優れている点、豊富なアプリケーション制御が可能な点について説明します。
-
 ポンプの
ポンプの
基礎知識クラス
移送に関する基本情報を
わかりやすくコンパクトに
解説していきます。- 【A-1a】ポンプの種類
- 【A-1b】ポンプの種類(容積式ポンプ)
- 【A-2】ポンプの原理
- 【A-3a】軸封装置
- 【A-3b】軸封装置(メカニカルシール)
- 【A-3c】軸封装置(グランドパッキン)
- 【A-4a】NPSH(Ⅰ)
- 【A-4b】NPSH(Ⅱ)
- 【A-5】ウォーターハンマー
- 【A-6a】ポンプ選定時に確認すべき事項(1)
- 【A-6b】ポンプ選定時に確認すべき事項(2)
- 【A-6c】ポンプ選定時に確認すべき事項(3)
- 【A-7a】ポンプに使用される金属材料について
- 【A-7b】ステンレス鋼について
- 【A-7c】ステンレス鋼の腐食形態について
- 【A-7d】ポンプに使用される非鉄金属について
- 【A-8a】ポンプに使用されるゴム材料について
- 【A-8b】ゴム材料の物理的な特性
- 【A-8c】ゴム材料の化学的な特性
- 【A-9a】金属材料への表面処理
-
 ポンプの
ポンプの
周辺知識クラス
規格や周辺機器情報などを
解説していきます。- 【B-1a】ポンプの洗浄1
- 【B-1b】ポンプの洗浄2(自動洗浄における洗浄効果の因子)
- 【B-1c】ポンプの洗浄3(SIPとASEPTIC)
- 【B-2a】駆動機(駆動機の概要)
- 【B-2b】駆動機(三相交流かご形誘導モーター)
- 【B-2c】駆動機(保護方式と耐熱クラス)
- 【B-2d】駆動機(モーター技術の動向)
- 【B-2e】駆動機(変速装置・減速装置)
- 【B-2f】駆動機(番外編:周波数)
- 【B-3a】インバーターの基礎知識(Ⅰ)
- 【B-3b】インバーターの基礎知識(Ⅱ)
- 【B-3c】インバーターの基礎知識(Ⅲ)
- 【B-3d】インバーターの基礎知識(Ⅳ)
- 【B-3e】インバーターの基礎知識(Ⅴ)
- 【B-3f】インバーターの基礎知識(Ⅵ)
- 【B-4】防爆
- 【B-5】管材と計測器
- 【B-6】トップランナーモーター
- 【B-7】マグネットカップリング
-
 移送物の
移送物の
基礎知識クラス
液の特長や性状および
主な用途などを
解説していきます。 -
 IoT・AIで変わる
IoT・AIで変わる
「送る&運ぶ」
移送・搬送の現場がIoT化、
AI(人工知能)活用で
どのように変わるのか。
伊藤元昭氏が解説します。- 第1回:産業機器のIoT化で何が変わるか
- 第2回:IoTは、日本のものづくり企業こそ活用すべき
- 第3回:AI活用の本質は、匠の技やベテランの知恵の機械化
- 第4回:AI活用を円滑・効果的に進めるための鍵は現場力にあり
- 第5回:AIの「ブラックボックス問題」との付き合い方
- 第6回:5Gで加速する工場・プラントでのIoT活用
- 第7回:ものづくりのDXで、現場の仕事はどう変わるのか?①
- 第8回:ものづくりのDXで、現場の仕事はどう変わるのか?②
- 第9回:協働ロボットで作る、人と機械が助け合う現場
- 第10回:コロナ禍で加速した、ものづくりでのAI/IoT活用
- 第11回:IoT/AIを駆使して対応する脱炭素時代のものづくり
- 第12回:製造業での脱炭素化、最初に始めたいこととは
- 第13回:サプライチェーンの管理は見える化から自律化へ
- 第14回:パブリックな仮想世界、メタバースは製造業に何をもたらすのか
- 第15回:メタバース上のバーチャルファクトリーで、多方面の専門家が密に協業
- 第16回:リチウムイオン二次電池から全固体電池へ、実現の鍵を握る技術「MI」
- 第17回:電極・電解質・イオン種、全方位で進化し続ける二次電池
- 第18回:スマホや自動運転車の技術転用で、産業機器や働くクルマの自律化を実現
- 第19回:再エネ主力電源化時代が到来、大口需要家である工場に求められる備えとは
- 第20回:メンテナンス業務を再定義する、IoT遠隔監視システム
- 第21回:生成AI活用で加速する、製造業での自動設計と新素材開発
-
 現場の声で、
現場の声で、
ひとくふう
モーノポンプの使い方は現場によりさまざま。
ひとくふうを加えると、
実はおもしろい発見が!



